1University of California, Berkeley 2Stanford University 3XDOF
*Equal contribution. †Corresponding author: yujustin@berkeley.edu



Which Data is Worth Imitating?
On long-horizon tasks, collecting high-quality data becomes increasingly difficult. Even skilled humans make mistakes on challenging tasks, leaving low-quality segments scattered throughout otherwise-successful demonstrations. This pushes roboticists toward data curation: deciding which data is actually worth imitating.
Many approaches curate at the trajectory level, discarding any demonstration that shows mistakes or progress stagnation and regression. On longer tasks this strategy wastes large amounts of data, and it throws away the recovery segments that crucially teach a policy how to get back on track after a mistake.
Many finer-grained approaches estimate progress inside a demonstration and filter or re-weight individual action chunks by how much they advance the task. SARM and ARM learn this from human-annotated labels on long-horizon T-shirt folding.
A common self-supervised signal in progress reward modeling is the fraction of the trajectory completed so far, the normalized frame index1. But elapsed time and task progress are not the same: scoring by the clock implicitly assumes that different demonstrations progress at the same rate, but in long-horizon tasks, demonstrations can often be at different progresses for the same temporal label:

All three frames sit at 50% of their video, yet show different stages of the task. We conjecture that supervising on normalized elapsed time injects noise into task progress estimation models, an issue exacerbated for longer horizon tasks.
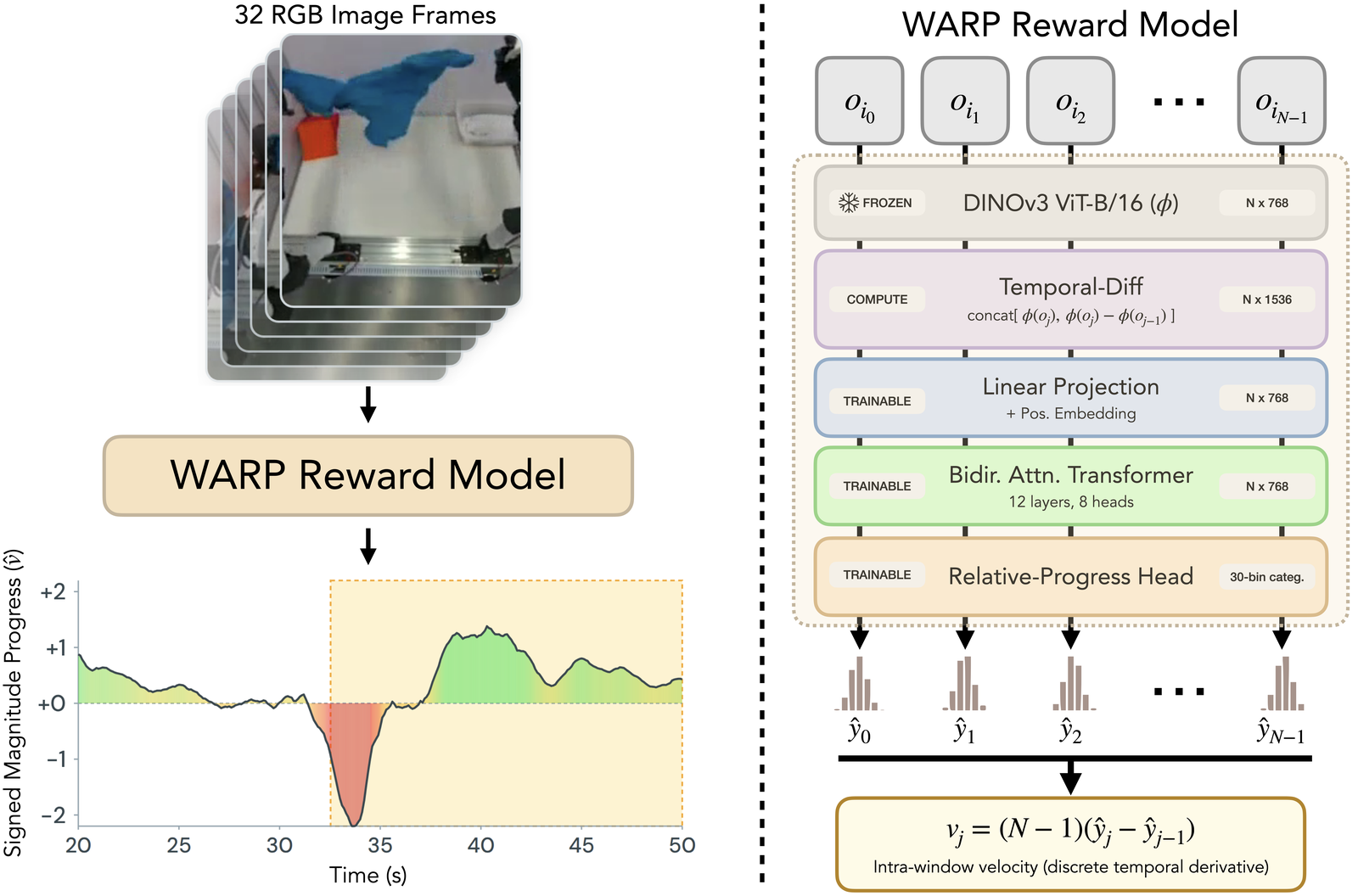
WARP-RM produces a dense, signed, per-frame progress velocity signal straight from the demonstrations, with no human annotations required.
The progress signal
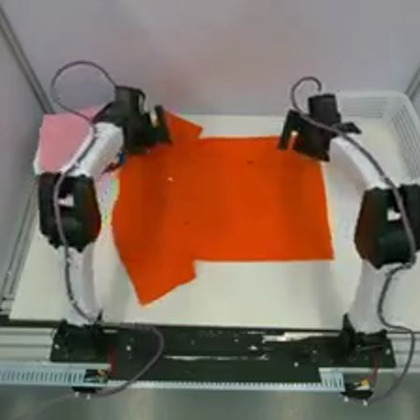
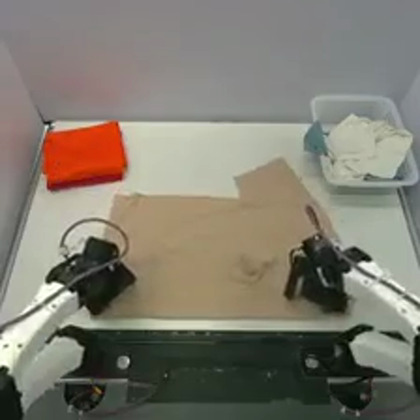
The curve under each video is WARP-RM's output: a dense, per-frame signed progress velocity, \(\hat{v}_{t}\), calibrated so that \(\hat{v}_t \approx 1\) matches the pace of the average reference demonstrations, \(\hat{v}_t \approx 0\) is stalling progress, and \(\hat{v}_t < 0\) is regressing progress. Click anywhere on the curve to scrub the video.
Episodes A and B play real teleoperated episodes while the curve shows the dense per-frame predicted signed progress magnitude \(\hat{v}_{t}\): positive for forward task progress and negative for regression. Click on the curve to scrub through the video.
Method
Each training example is a window of 32 frames sampled from a successful demonstration. Per-step playback speeds are drawn from an AR(1) process in log-space, so the clip drifts smoothly between slow-motion and fast-forward, and the total span the window covers is itself sampled, anywhere from a short stretch seen in slow motion to most of the demonstration skimmed quickly. Some steps run in reverse (Poisson-sampled), and the whole window is flipped with probability 0.5. Each frame's signed offset from the window's first frame is its progress label, with no annotation.
A frozen DINOv3 ViT-B/16 + 12-layer bidirectional transformer head outputs a per-frame categorical distribution over cumulative progress. Its temporal derivative gives the velocity \(\hat{v}_{t}\):
\(\hat{v}\) ≈ 1 → expert pace, \(\hat{v}\) ≈ 0 → stagnating, \(\hat{v}\) < 0 → regressing
For each training chunk, gate on the predicted velocity at its terminal frame. With \(\tau = 1.0\), only chunks ending in faster-than-expert progress are kept, and each is weighted continuously by its velocity:
\( w \;=\; \hat{v}_{\mathrm{end}} \cdot \mathbf{1}\{\,\hat{v}_{\mathrm{end}} > \tau\,\} \)
Data
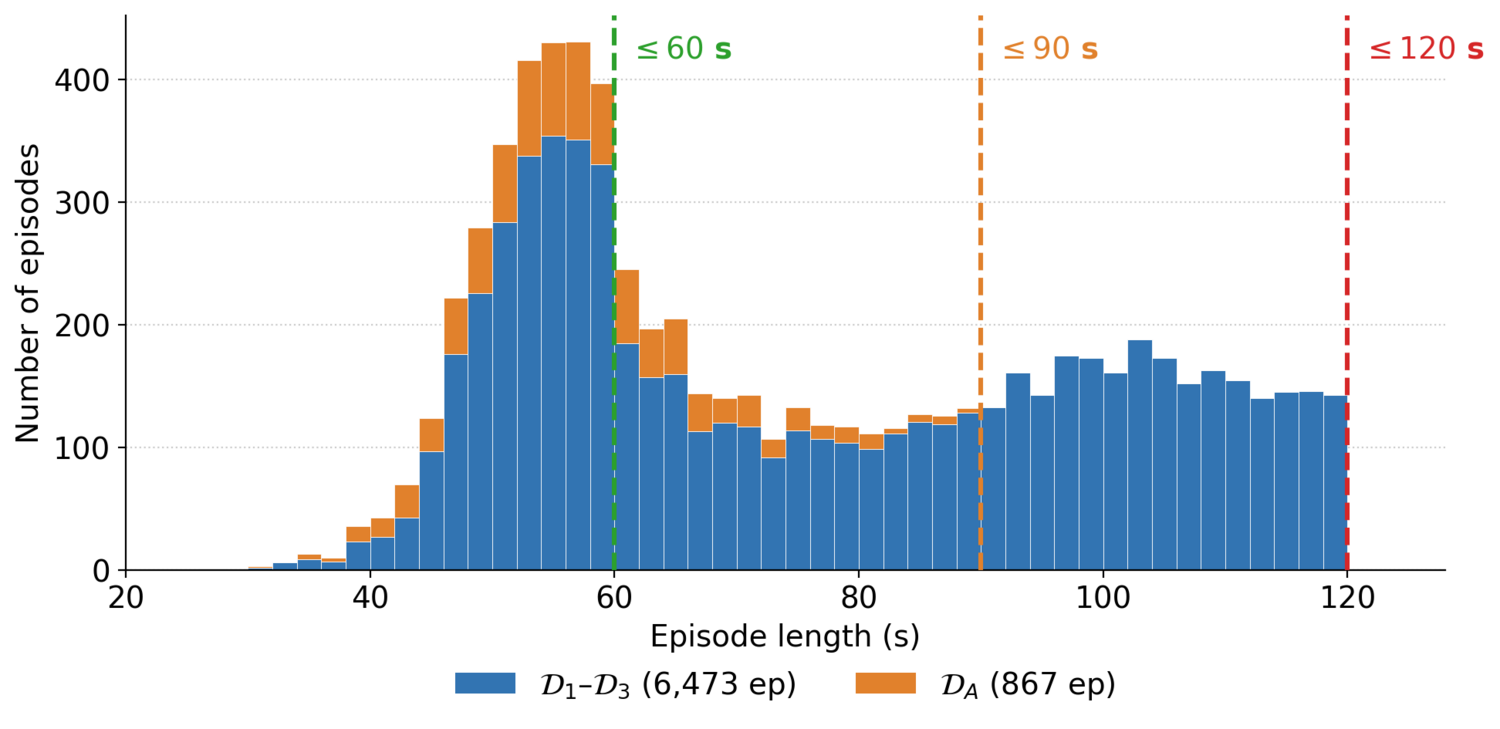
Our policy-training data is drawn from a dataset of around 140 hours of successful, unannotated human-teleoperated T-shirt-folding demonstrations. On this task, episode length is a coarse proxy for execution efficiency: longer episodes tend to contain more hesitations, retries, and recoveries. To evaluate robustness as progressively more inefficient behavior is admitted into training, we define three nested, length-filtered tiers: \(\mathcal{D}_{1}\) (≤ 60s): 2,427 episodes (36.1 hours), \(\mathcal{D}_{2}\) (≤ 90s): 4,124 episodes (71.3 hours), and \(\mathcal{D}_{3}\) (≤ 120s): 6,473 episodes (139.7 hours). Policies are trained on the same underlying demonstrations, either with uniform weighting (vanilla BC) or WARP-based progress reweighting. A single WARP-RM model is used across all tiers: it is trained once on a fixed reference subset \(\mathcal{D}_{\mathrm{RM}}\), the shortest demonstrations (≤ 59.8s, 1,950 episodes), providing a clean reference signal for the canonical execution pace (\(\hat{v} = 1\)). For baseline comparisons, SARM requires human annotations, so an annotated supplement \(\mathcal{D}_{A}\) (867 expert demonstrations, 13.9 hours) is added, forming the augmented datasets \(\mathcal{D}_{4} = \mathcal{D}_{1} \cup \mathcal{D}_{A}\) and \(\mathcal{D}_{5} = \mathcal{D}_{2} \cup \mathcal{D}_{A}\); WARP-RM and all other baselines treat \(\mathcal{D}_{A}\) as unannotated.
| Dataset / tier | Filter | Episodes | Total hours |
|---|---|---|---|
| \(\mathcal{D}_{1}\) | policy training, ≤ 60s | 2,427 | 36.1 |
| \(\mathcal{D}_{2}\) | policy training, ≤ 90s | 4,124 | 71.3 |
| \(\mathcal{D}_{3}\) | policy training, ≤ 120s | 6,473 | 139.7 |
| \(\mathcal{D}_{A}\) | annotated supplement (SARM) | 867 | 13.9 |
| \(\mathcal{D}_{\mathrm{RM}}\) | WARP-RM reference, ≤ 59.8s | 1,950 | 28.7 |
Real-World Policy Rollouts
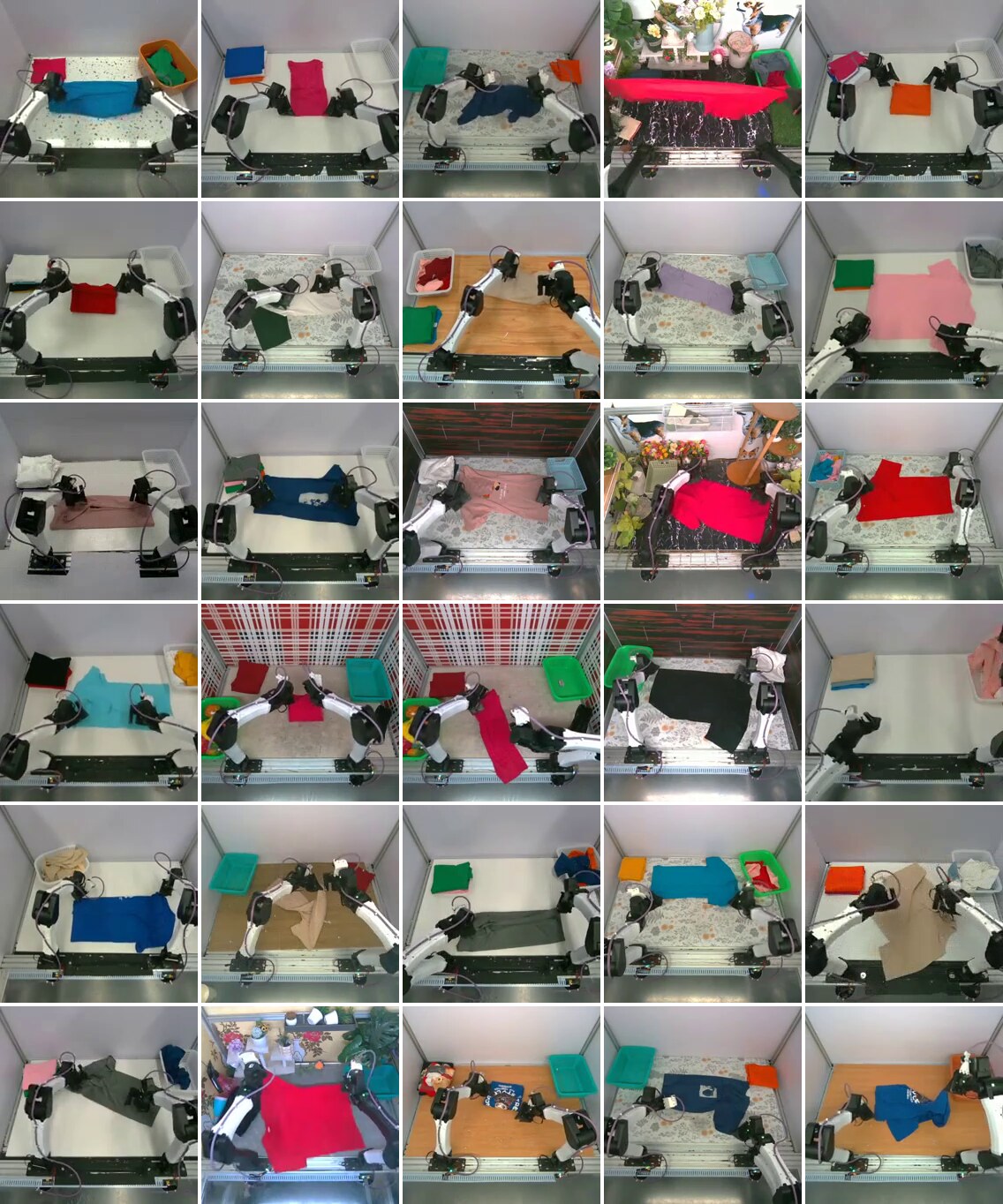
Across 380 real-world trials of T-shirt folding from a crumpled start, WARP-BC succeeds more often, and finishes faster when it does, than vanilla BC and the other baselines trained on the same dataset. Each grid below plays all 20 evaluation trials for one tier at once, in a 4×5 layout. Use the selector to switch between the three demonstration tiers.
Videos played at 1× speed.
Quantitative Results
Cross-tier results on T-shirt folding
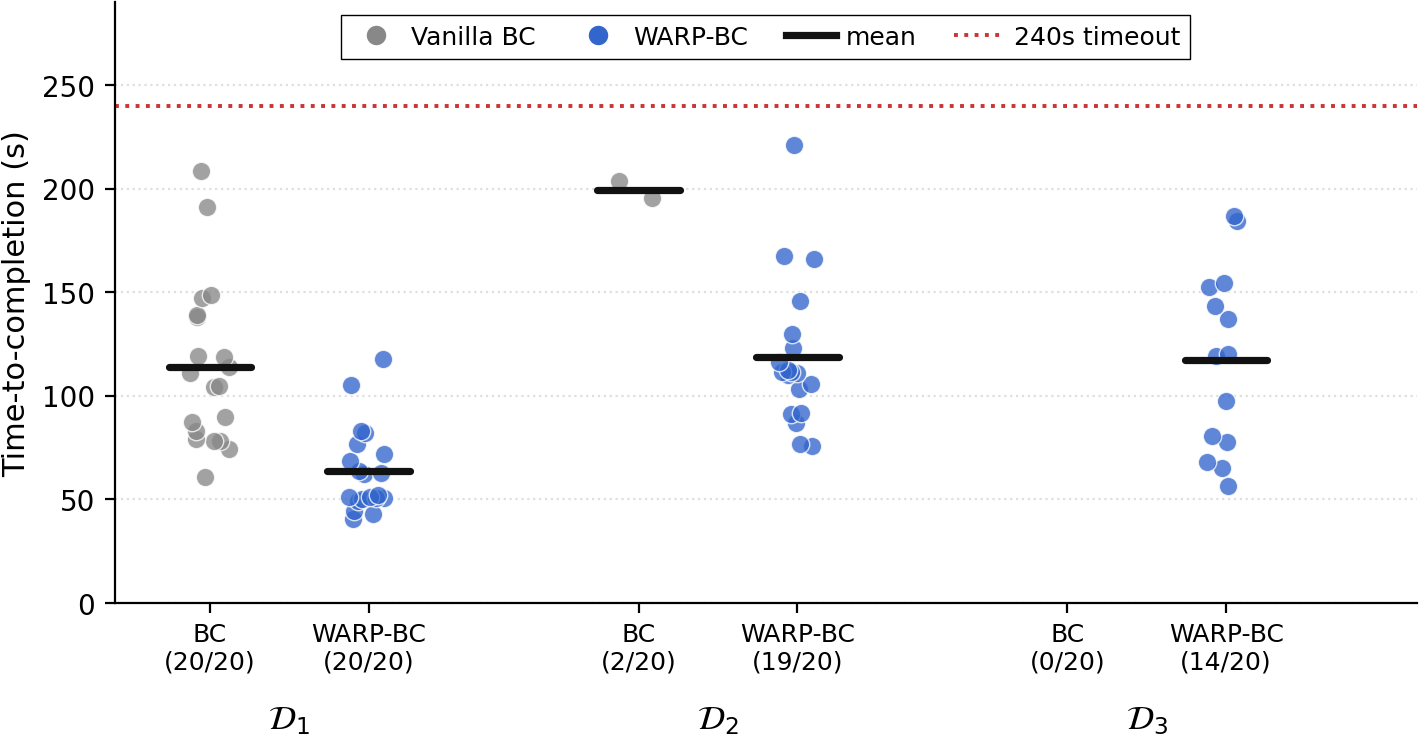
All policies are evaluated on 20 trials of T-shirt folding from a crumpled start with a 240s timeout. Mean time-to-completion (TTC) is reported over successful trials only. As the training pool admits more suboptimal demonstrations, vanilla BC degrades sharply while WARP-BC stays robust.
| Method | Metric | \(\mathcal{D}_{1}\) (≤60s) | \(\mathcal{D}_{2}\) (≤90s) | \(\mathcal{D}_{3}\) (≤120s) |
|---|---|---|---|---|
| Vanilla BC | Success ↑ | 20/20 | 2/20 | 0/20 |
| Mean TTC (s) ↓ | 113.8 | 199.0 | N/A | |
| Throughput (/hr) ↑ | 31.6 | 1.5 | 0.0 | |
| Action Chunks Kept | 100% | 100% | 100% | |
| WARP-BC | Success ↑ | 20/20 | 19/20 | 14/20 |
| Mean TTC (s) ↓ | 63.9 | 118.8 | 117.4 | |
| Throughput (/hr) ↑ | 56.3 | 27.4 | 16.3 | |
| Action Chunks Kept | 35.7% | 34.4% | 22.5% |
Matched baseline comparisons
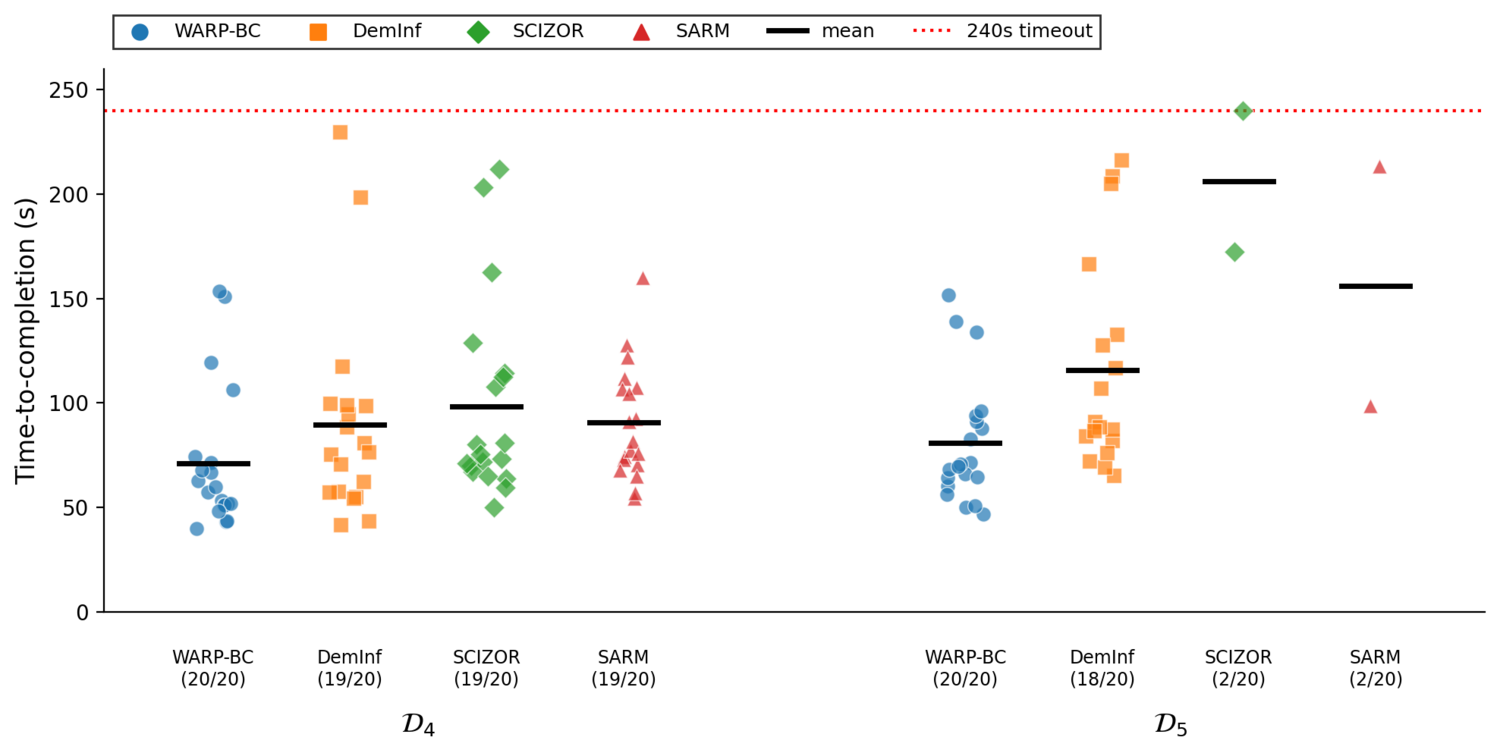
Because SARM requires human-annotated subtask boundaries, all methods are evaluated on the augmented corpora \(\mathcal{D}_{4} = \mathcal{D}_{1} \cup \mathcal{D}_{A}\) and \(\mathcal{D}_{5} = \mathcal{D}_{2} \cup \mathcal{D}_{A}\), where \(\mathcal{D}_{A}\) is the annotated supplement (treated as unannotated by every method except SARM). WARP-BC sustains the highest throughput on both tiers and ties or leads on success, all without the human labels SARM needs. SARM and SCIZOR collapse on the noisier \(\mathcal{D}_{5}\), while DemInf stays robust on success but at lower throughput.
| Method | Metric | \(\mathcal{D}_{4}\) | \(\mathcal{D}_{5}\) |
|---|---|---|---|
| SARM | Success ↑ | 19/20 | 2/20 |
| Mean TTC (s) ↓ | 90.5 | 156.0 | |
| Throughput (/hr) ↑ | 34.9 | 1.55 | |
| Action Chunks Kept | 78.5% | 66.6% | |
| DemInf | Success ↑ | 19/20 | 18/20 |
| Mean TTC (s) ↓ | 89.6 | 115.8 | |
| Throughput (/hr) ↑ | 35.2 | 25.3 | |
| Action Chunks Kept | 45.6% | 33.7% | |
| SCIZOR | Success ↑ | 19/20 | 2/20 |
| Mean TTC (s) ↓ | 98.4 | 206.2 | |
| Throughput (/hr) ↑ | 32.4 | 1.5 | |
| Action Chunks Kept | 77.9% | 66.7% | |
| WARP-BC | Success ↑ | 20/20 | 20/20 |
| Mean TTC (s) ↓ | 71.2 | 80.7 | |
| Throughput (/hr) ↑ | 50.6 | 44.6 | |
| Action Chunks Kept | 45.6% | 33.7% |
Another Task: Bottle-in-Bin Placement
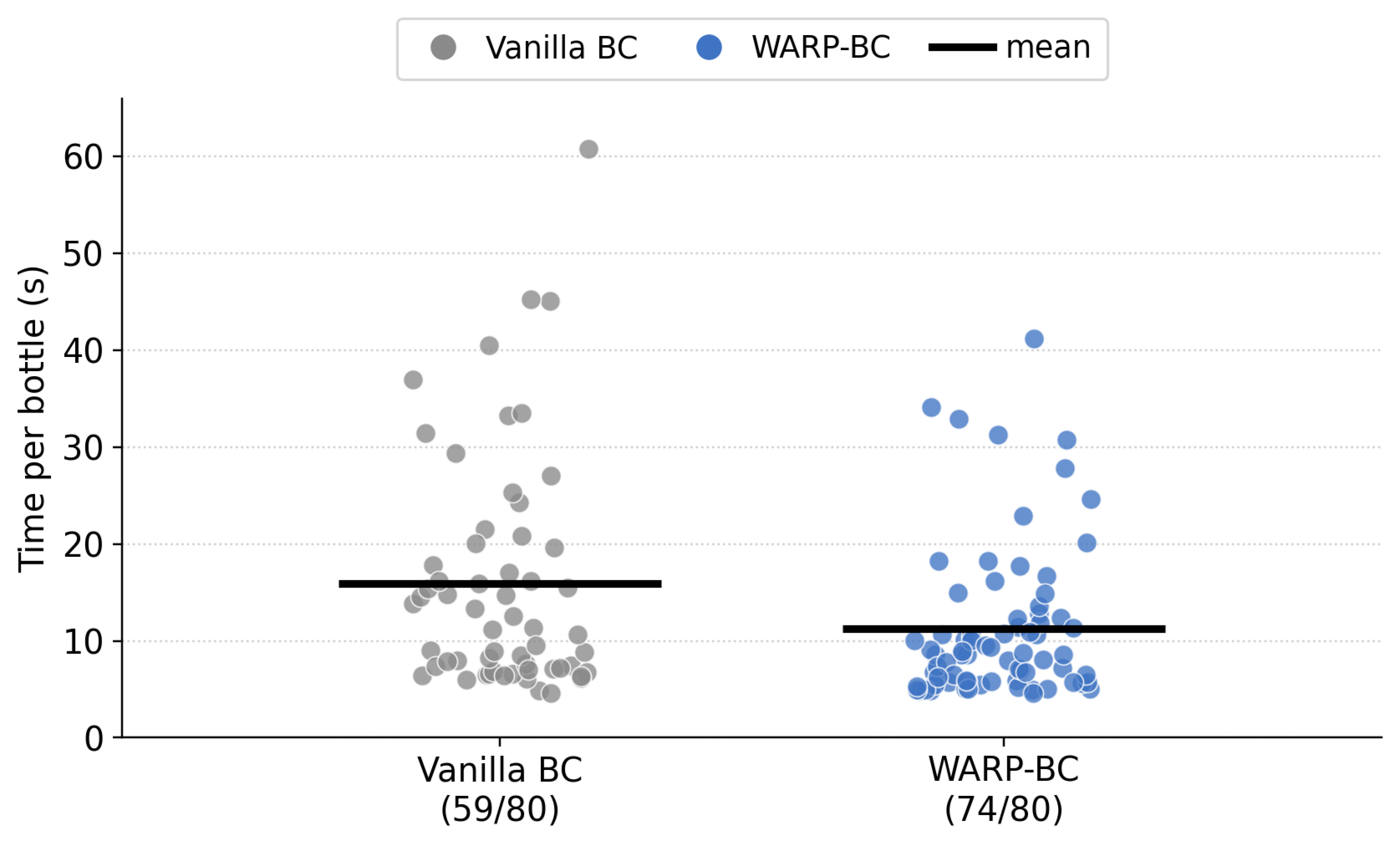
Beyond folding, we run the same recipe on a bottle-in-bin placement task with the same bimanual robot. Each trial drops four bottles into a bin under a 90 s timeout (20 trials, 80 bottles per policy), and both policies train on the same demonstrations.
Each grid plays all 20 trials at 1× speed, fully autonomous.
| Method | Bottles placed ↑ | Time / bottle (s) ↓ | Throughput (/hr) ↑ | Act. Chunks Kept |
|---|---|---|---|---|
| Vanilla BC | 59 / 80 | 15.9 | 147.8 | 100% |
| WARP-BC (Ours) | 74 / 80 | 11.3 | 237.8 | 30.6% |
WARP-BC places more bottles (74/80 vs 59/80), cuts mean per-bottle time from 15.9→11.3 s, and improves throughput 1.6×.
Ablations
All ablations are run on dataset \(\mathcal{D}_{2}\). Kept-train-samples reports the fraction of action chunks that survive the weighting filter.
| Variant | Success ↑ | Mean TTC (s) ↓ | Throughput (/hr) ↑ | Action Chunks Kept |
|---|---|---|---|---|
| Weighting function | ||||
| \(\tau = 0\) | 3/20 | 201.4 | 2.3 | 97.0% |
| \(\tau = 1\), max = 1 (binary) | 16/20 | 139.6 | 18.0 | 34.4% |
| \(\tau = 1\), continuous — WARP | 19/20 | 118.8 | 27.4 | 34.4% |
| RA-BC aggregation strategy | ||||
| Mean over 1s action chunk | 15/20 | 127.0 | 17.4 | 34.0% |
| Mean over 1s, one-chunk offset | 14/20 | 124.2 | 15.9 | 34.3% |
| Terminal \(\hat{v}_{end}\) — WARP | 19/20 | 118.8 | 27.4 | 34.4% |
| WARP sampler | ||||
| IID log-normal | 18/20 | 131.0 | 22.8 | 28.7% |
| AR(1) process — WARP | 19/20 | 118.8 | 27.4 | 34.4% |
Project Video
- Progress reward models that supervise on this signal include Robometer, ReWiND, and ProgressVLA. Each regresses a frame's normalized position in the trajectory, from the first frame to the last, as its per-frame progress target.
Citation
@article{yu2026warp,
title={WARP-RM: A Warp-Augmented Relative Progress Reward Model for Data Curation},
author={Yu, Justin and Goldberg, Andrew and Kondap, Kavish and El-Refai, Karim and Ransing, Ethan and Chen, Qianzhong and Schwager, Mac and Shentu, Fred and Wu, Philipp and Goldberg, Ken},
journal={arXiv preprint arXiv:2606.28320},
year={2026}
}