
I am a third-year PhD student in the Berkeley Artificial Intelligence Research (BAIR) group, specializing in Robotics and Artificial Intelligence. My research interests include robot learning for manipulation, code-as-policy, and real-to-sim-to-real. Broadly, I focus on developing systems and algorithms that enable real-world robots to learn and perform practical manipulation tasks.
I am advised by Ken Goldberg in the AUTOLab and am supported by the National Science Foundation Graduate Research Fellowship Program (NSF GRFP). I graduated Summa Cum Laude with a B.S.E. in Electrical Engineering from the University of Michigan, Ann Arbor in 2023.
Egocentric Manipulation Interface (EgoMI)
Publications
 arXiv
arXiv
Projects
I2RT YAM Active Leader Arms (In Progress)
Weekend project to develop open source hardware and software for I2RT YAM leader arms (imitation learning teaching devices).
Realtime Robots Control Package
Open source software package to control real-world robot arms including the I2RT YAMs, Franka Panda.
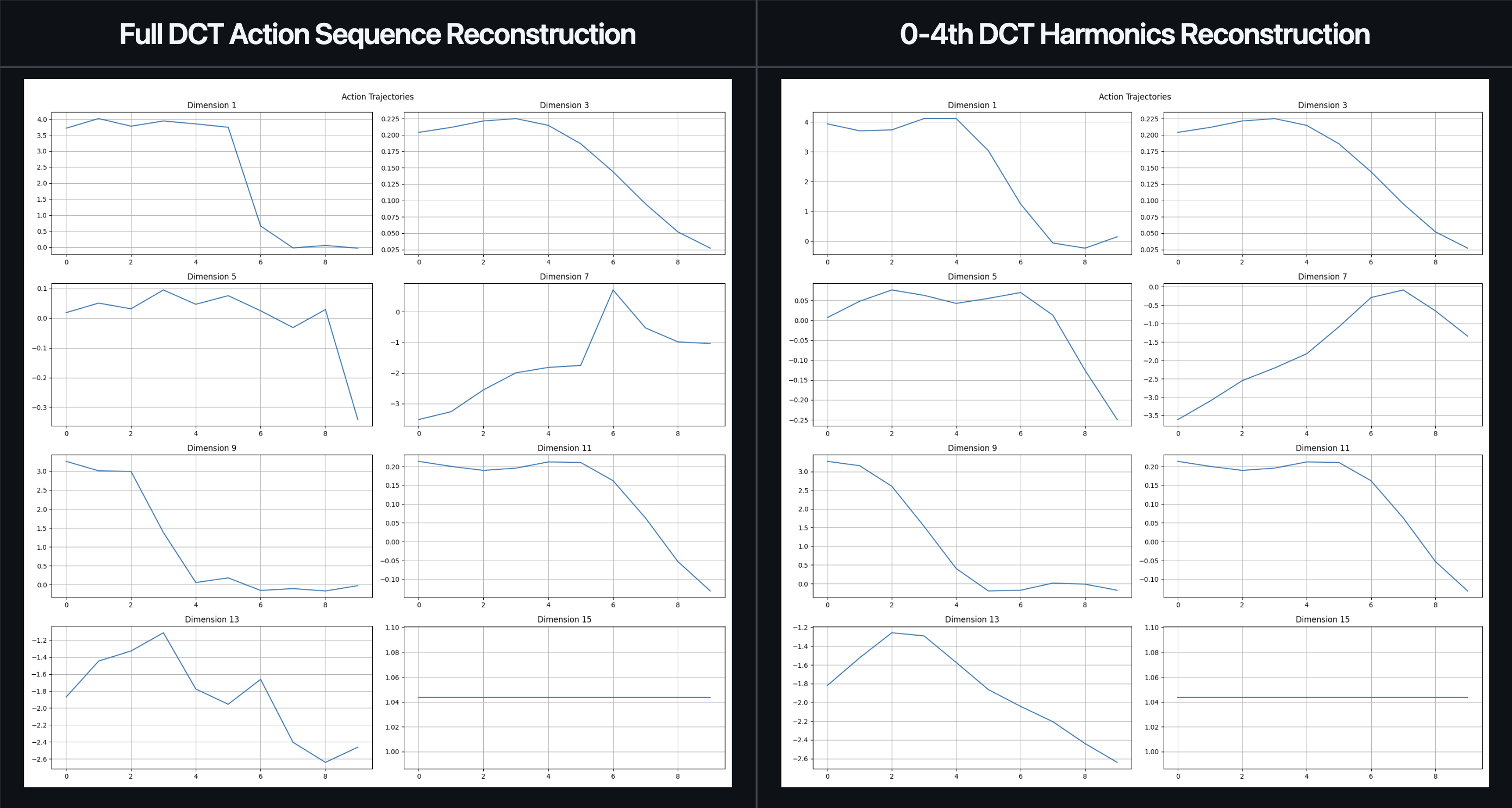
Faster PI0-FAST model inference with a few frequency domain tricks
Objective: Faster PI0-FAST robot VLA (Vision-Language-Action) model inference time; A DCT (discrete cosine transform) early stopping trick implementation for FAST (Frequency-Space Action Sequence Tokenization). The idea is to decode only the first few DCT coefficients from the PaLi-Gemma VLM rather than waiting for a full action chunk inference to complete. This can cut down inference to action time by roughly half since around the first 3-4 frequency harmonics of the DCT are typically enough for a coarse action sequence reconstruction.
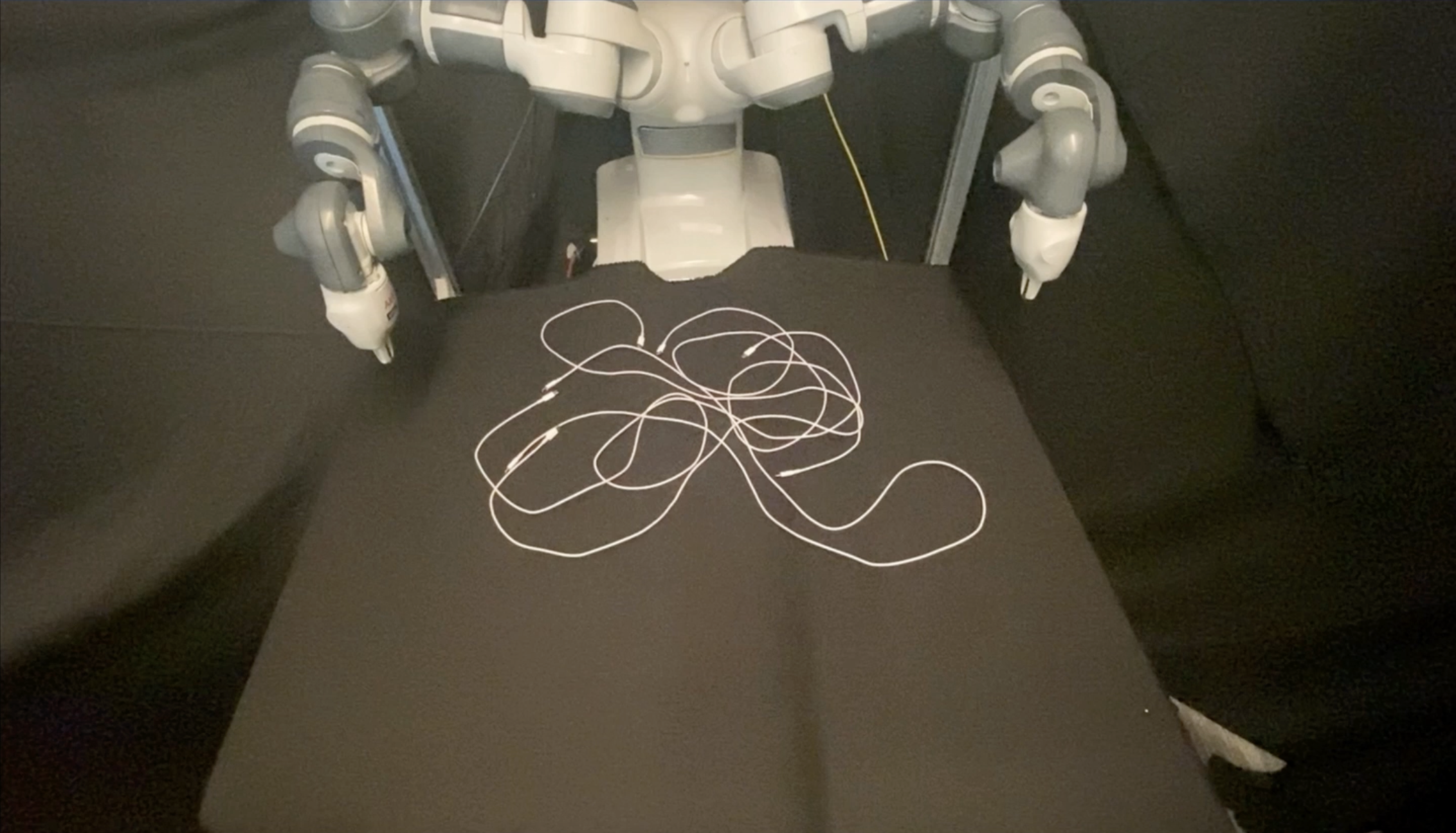
YuMi IRB14000 Bimanual Robot Realtime Control Package
Open source software package to control the ABB YuMi IRB14000 bimanual robot in realtime (240Hz) through control interfaces including: interactive websocket GUI, Meta Quest VR Controllers, and autonomous Diffusion Policy (shown), PI0-FAST and NVIDIA-GR00T VLA models.

2023 Michigan Mars Rover - Dahlia
Affiliation: Team Lead - RF Wireless Communications for University of Michigan Mars Rover team
Dahlia received a System Acceptance Review score of 92.21/100!

2022 Michigan Mars Rover - Rosie
Affiliation: Team Lead - RF Wireless Communications for University of Michigan Mars Rover team
Rosie received a System Acceptance Review score of 90.97/100 and finished FIRST PLACE at the URC and CIRC competitions!

2021 Michigan Mars Rover - Blue
Affiliation: Robotic Arm Hardware Designer for University of Michigan Mars Rover team
Though in-person competition was cancelled due to the pandemic, we were still judged on our submission, receiving a System Acceptance Review score of 93.09/100!

Elevated Robotic Assistive Device
Affiliation: Co-Designer and Mechanical Designer
An elevated robotic system which provides smooth and efficient traversal along an elevated track.
2020 FRC Robot - Cheems
Affiliation: Team Lead - Mechanical Design and Fabrication for 3128 Aluminum Narwhals.
Cheems is a transforming arm robot with a ball shooter at the end of the large arm. Unfortunately, the season was cut short due to the pandemic.
2019 FRC Robot - Gromit
Affiliation: Team Lead - Mechanical Design and Fabrication for 3128 Aluminum Narwhals.
Gromit ranked 1st seed at Monterey Bay Regional and advanced to become an Alliance Captain at the FRC World Championship in Houston.

2018 FRC Robot - Guido
Affiliation: Member of Mechanical Design and Fabrication for 3128 Aluminum Narwhals.
Guido joined the first seeded team in the World Championship event, but was unfortunately eliminated in finals matches.
2017 FRC Robot - Ferb
Affiliation: Member of Mechanical Design and Fabrication for 3128 Aluminum Narwhals.
Ferb became the Finalist Alliance Captain at the San Diego Regional, securing a spot at the FRC World Championship in Houston.